"This is a war for resources"
|
Background
Rich veins of rare elements ores, including valuable element 218 Obtainium, are found on Mars by research geologists.
As employees from Carryer-Kenny Holdings (CKH), a large multinational conglomerate with interests in mostly every industry, we are given Mineral Identification, Nucleation, and Extraction Rigs (MINERs) to exploit Obtainium.
Although reliable source indicates that Peterson Pediment has the most concentrated deposits of Obtainium, we have to build our own TRACTOR for Commercializing The Obtainable Resources to move MINERs to designated positions, in order to successfully obtain element 218.
After our consistent efforts for two weeks, everything works smoothly now, and we can feel the day going home is getting closer and closer.
Until we are informed that a team belonging to our chief competitor, Gumerlock Heavy Industries (GHI), is also approaching the Peterson Pediment...
As employees from Carryer-Kenny Holdings (CKH), a large multinational conglomerate with interests in mostly every industry, we are given Mineral Identification, Nucleation, and Extraction Rigs (MINERs) to exploit Obtainium.
Although reliable source indicates that Peterson Pediment has the most concentrated deposits of Obtainium, we have to build our own TRACTOR for Commercializing The Obtainable Resources to move MINERs to designated positions, in order to successfully obtain element 218.
After our consistent efforts for two weeks, everything works smoothly now, and we can feel the day going home is getting closer and closer.
Until we are informed that a team belonging to our chief competitor, Gumerlock Heavy Industries (GHI), is also approaching the Peterson Pediment...
Project Description
The goal of the project was to build a robot which would autonomously navigate a square playing field, locate miners (cylindrical tube with IR emitters on top) and place it at a designate zone, i.e. one of the colored squares.
The playing field had a north-to-south tilt of 3 degrees and was divided in 16 equal zones, each with a distinct color and dimension of 60 cm × 60 cm. The robot location and miner positions were randomized at the start of the game. The robot had an Xbee wireless chip which could be used to read state of the game at any given instant. The information available through wireless communication were: mining operation status (game status), current MINER locations, resource level, and mining location (MINER target location). The main sub-tasks of the project was to first localize the robot within the playing field, locate the MINER, capture the MINER, detect and respond to collision and place the MINER at a specified location as already describer above.
The playing field had a north-to-south tilt of 3 degrees and was divided in 16 equal zones, each with a distinct color and dimension of 60 cm × 60 cm. The robot location and miner positions were randomized at the start of the game. The robot had an Xbee wireless chip which could be used to read state of the game at any given instant. The information available through wireless communication were: mining operation status (game status), current MINER locations, resource level, and mining location (MINER target location). The main sub-tasks of the project was to first localize the robot within the playing field, locate the MINER, capture the MINER, detect and respond to collision and place the MINER at a specified location as already describer above.
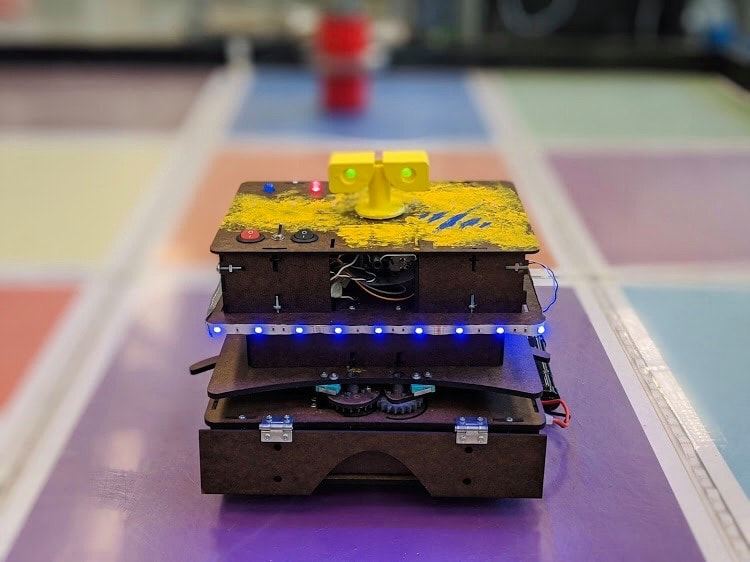
Our TRACTOR - Underminer